
Midi 16x servo CPU ATMega168
Midi 16x je o 8bit AVR® RISC CPU Architecture s 16Kb EEPROM
- Pracovní frekvence: 11.059200 Mhz
- Napájení 7.2 - 12 V spotřeba cca 9mA (bez serv)
- Přenos dat - sériová linka , ovládací paket 4 Byte (3x datový + 1x CR)
- Komunikační rychlost seriové linky: 9600,14400,28800,38400,57600,115200 bps
- Obousměrná komunikace
- Rozsah šířky pulzu: 500us - 2490us
- Krok 1us
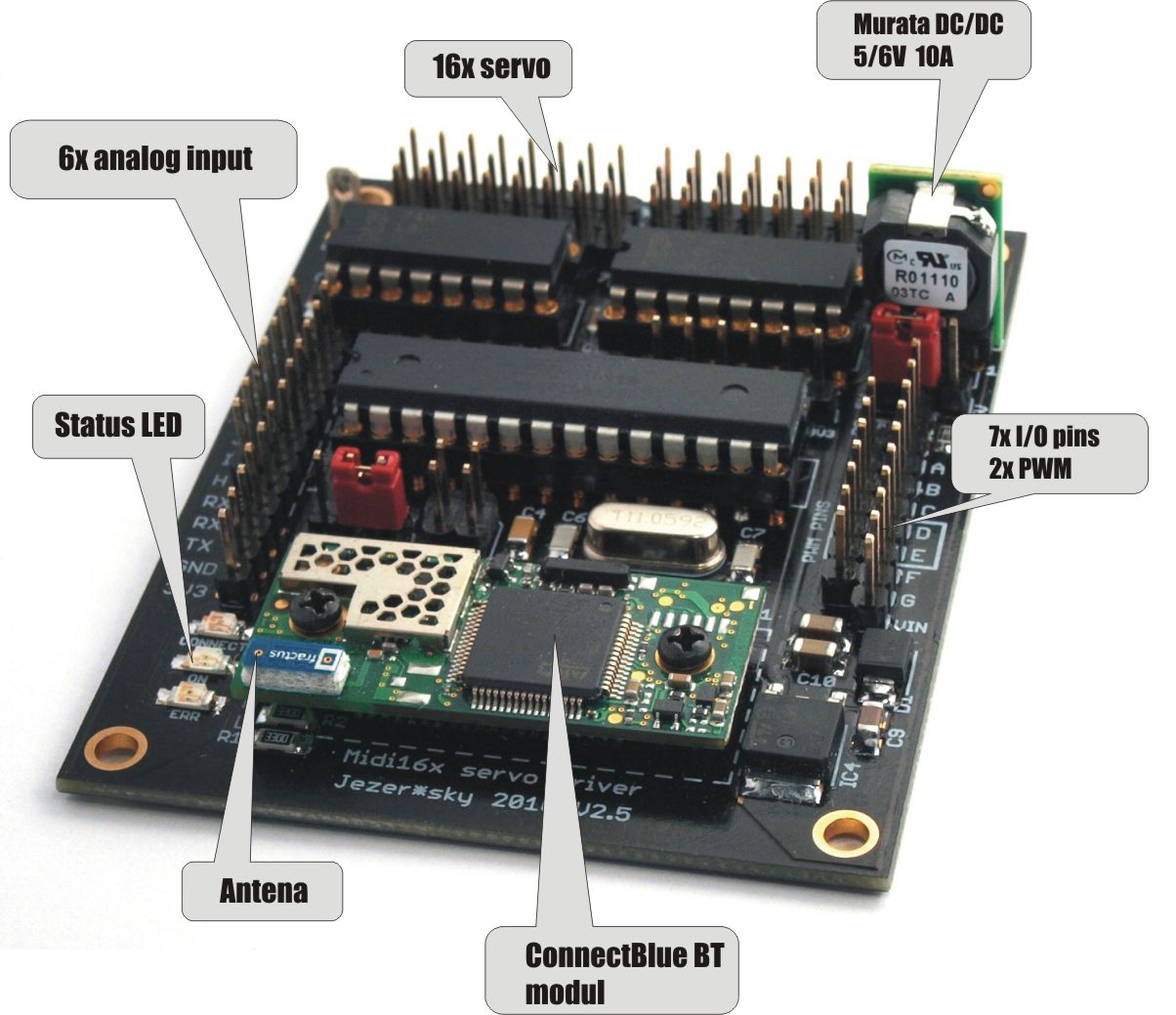
- Konfigurovatelné analogové a digitální vstupy a výstupy
- 8bitové PWM 2x
- Možnost uložit do EEPROM minimální a maximální šířku pulzu (výchylku serva) a startovací pozici pro každé servo
- Suspend serva - negeneruje řídící puls, vhodné pro šetření energie
- Opakovací frekvence 50Hz (20ms) nezávislá na šířce jednotlivých pulsů
- Nastavitelná rychlost serva v us/s
- 10A DC/DC měnič na desce s volitelným napětím 5/6V
Midi16x je ovladač pro projekty, který Vám umožní obousměrnou komunikaci. Můžete tedy vysílat povely a zároveň přijímat hodnoty, které Midi16x získává ze svých vstupů. Jeho vlastnosti vyplývají z MCU ATMega168, přibližme si podrobněji jejich funkci:
- ovládá až 16 modelářských serv s možností negenerovat řídící signál. Tím můžete výrazně šetřit energií v době, kdy servo nepoužíváte.
- Pro každé servo umožňuje do EEPROM nahrát startovací pozici serva po zapnutí a povolený rozsah řídícího signálu.
- Celkem má 13 vstupů a výstupů z toho 6 může být konfigurováno jako analogové vstupy s 10bit (hodnoty 0-1023) ADC a 2 piny můžete konfigurovat jako analogové výstupy (62.5khz 8bitová pulzně šířková modulace - pwm). Je tedy možné předávat hodnoty z analogových čidel nebo naopak ovládat např. 2 motory pro pohon (po dosazení výkonového prvku).
- Pro ADC převodník můžete volit referenční napětí - 1.1V , 3.3V , nebo externí v rozsahu 0.5 - 3.3V
- Všechny vstupy a výstupy je možné konfigurovat tak, aby při změně hodnoty tuto hodnotu odeslaly. Nejrychlejší scan je 100hz , tedy každých 10ms probíhá porovnání všech I/O pinů.
- Kontrolér je možné přepnout do módu 2ndf a tím posuneme adresy všech registrů. Všechny pakety s nižší adresou pak kontrolér propouští. Tím je možné spojit dva kontroléry sériově a ovládat tak dvojnásobný počet I/O pinů (26) a modelářských serv (32).
Pro rozhýbání 12ti serv byl použitý právě Midi 16x s ATMega168
... a také PentaPod - pětinohý robot. všechna serva jsou ovládána Midi16x kontrolérem